机器人已被应用于很多医学领域【94】。现代医学,尤其是现代医学影像学已经进入数字和机器人的时代,着眼于机器人在介入肿瘤学的应用是自然的事。目前介入肿瘤的机器人有两个潜在的角色。首先,他们可以充当“臂扩展”在透视和透视CT引导下的进行介入手术的操作,从而限制医生的辐射暴露。第二,机器人可以提高器械的位置的准确性【95 - 97】。
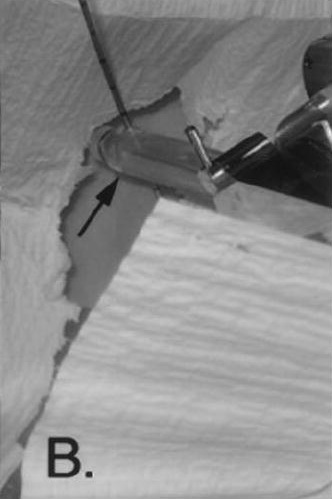
Registration method for aligning the robot’s coordinate system with that of the image involves use of the plane of the laser light in the CT scanner
用于将机器人坐标系与图像对准的配准方法,该方法涉及使用激光光在扫描平面上的平面
Two images sent by the physician to the computer workstation
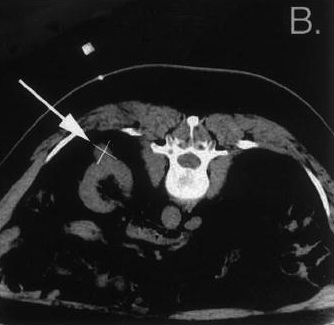
Examples of the robot position for three CT interventional procedures
使用集成的软件系统,可以选择靶目标的坐标,然后机器人可以提供介入器械到规定的位置。机器人的精确度有助于确保重叠消融和安全分离探针。机器人已应用于CT、MRI、X线透视,甚至超声的引导下的介入手术操作【98–100】。但是,精确标靶需要用于计划的图像病人图像配准和计算病人运动。所有这些都是面对导航和图像融合相同的挑战。 94. Marohn MR, Hanly EJ. Twenty-first century surgery using twenty-first century technology: surgical robotics. Curr Surg 2004; 61(5): 466–473
95. Solomon SB, Patriciu A, Bohlman ME, Kavoussi LR, Stoianovici D. Robotically driven interventions: a method of using CT fluoroscopy without radiation exposure to the physician. Radiology 2002;225(1):277–282.
96. Cleary K, Melzer A, Watson V, Kronreif G, Stoianovici D. Interventional robotic systems: applications and technology state-of-the-art. Minim Invasive Ther Allied Technol 2006;15(2):101–113
97. Hempel E, Fischer H, Gumb L, et al.. An MRI-compatible surgical robot for precise radiological interventions. Comput Aided Surg 2003;8(4):180–191.
98. Stoianovici D. Multi-imager compatible actuation principles in surgical robotics. Int J Med Robot 2005;1(2):86–100.
99. Boctor EM, Choti MA, Burdette EC, Webster Iii RJ. Three-dimensional ultrasound-guided robotic needle placement: an experimental evaluation. Int J Med Robot 2008;4(2):180–191.
100. DiMaio SP, Pieper S, Chinzei K, et al.. Robot-assisted needle placement in open MRI: system architecture, integration and validation. Comput Aided Surg 2007;12(1):15–24.
|