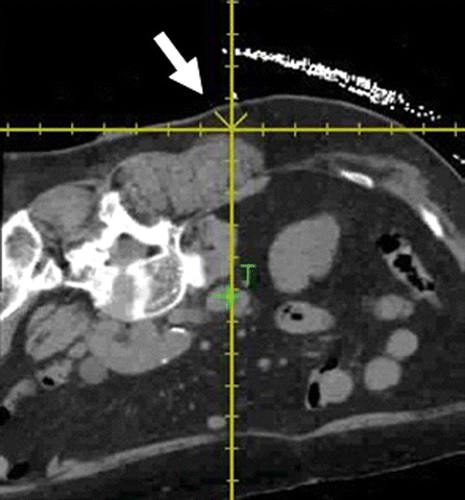
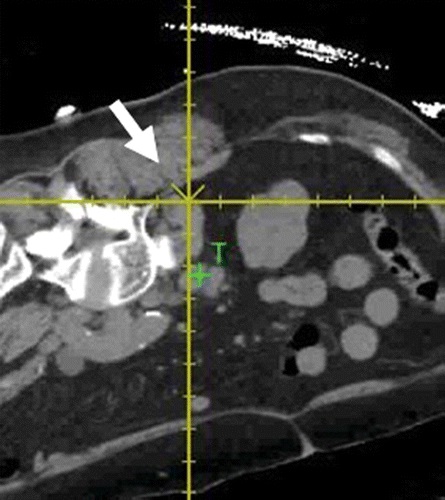
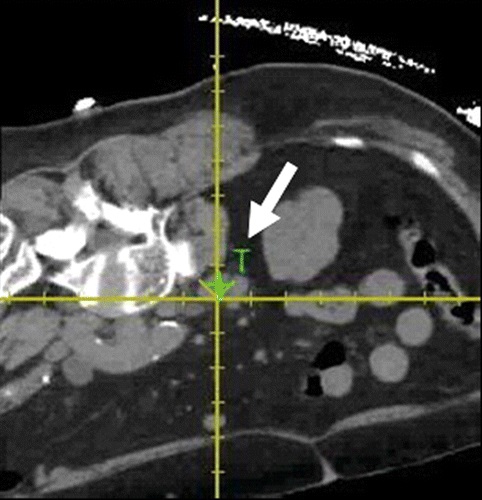
The integration of position sensors with interventional devices such as needles and ablation applicators allows them to be tracked in real time, with images obtained during a procedure. When used with multimodality image fusion, the coordinates of the device’s tip can be superimposed on previously acquired images or on real-time images (Fig 6). When a preprocedural CT scan is fused with a real-time US scan, the position of the device can be tracked in real time such that its position is known in relationship to the anatomy displayed both on the CT and US images. It may also allow the physiologic images such as those of PET to be incorporated into an intervention. Additionally, device tracking may allow out-of-plane trajectory imaging, such as directing a needle to the dome of the liver without transgressing the pleura. Navigation has even been reported on cone-beam CT images to further enable procedures in fluoroscopy rooms (86,87). However, all these navigation tools face the same image registration engineering challenges that image fusion does (88–93). 介入器械如穿刺针和消融电极的位置传感器集成可以在手术操作期间在图像上跟踪其轨迹信息。当使用多模式图像融合技术时,器械尖端的坐标能够在以前获取的图像或以实时影像重叠。
随着介入器械如针消融喷头可以实时跟踪定位传感器集成在一个程序中获得的图像。当使用多模态图像融合,该装置的尖端坐标可以叠加在先前获得的图像和实时图像(图6)。当术前CT扫描和实时扫描融合,设备的位置可以实时跟踪等,其位置是已知的解剖关系显示在CT和超声图像。它也可以允许的生理图像,如宠物,被纳入一个干预。此外,跟踪设备允许的平面轨迹成像,如引导针肝脏的圆顶不逾矩的胸膜。导航已经被报道的锥束CT图像进一步使透视室程序(86,87)。然而,所有这些导航工具面临着相同的图像配准工程的挑战,图像融合(88 - 93)。 |